Lernfähige Steuerungssysteme II
105 II | MOBIMA finanziert
Das Projekt Lernfähige Steuerungssysteme II befasste sich mit Untersuchungen zur Trainingskomplexität, der Skalierbarkeit und der Anpassung maschineller Lernsysteme an wechselnde Anforderungen und Zielmaschinen.
Zur direkten Anwendung wurde die Geschwindigkeitssteuerung beim Arbeitsprozess „Grubbern“ in der landwirtschaftlichen Bodenbearbeitung ausgewählt. Die entwickelte Steuerungsarchitektur ist durch den modularen Aufbau dazu geeignet, Rückschlüsse auf die Forschungsziele abzuleiten.
Abbildung 1 veranschaulicht die verwendete Architektur. Aktuelle Messwerte werden dazu genutzt, die Umgebungsbedingungen in Bezug auf das Traktions- und Zugkraftverhalten mittels mathematischer Modelle auf Basis von Expertenwissen abzubilden. Dies ermöglicht die Anpassung an wechselnde Anbaugeräte, da diese ausschließlich in Form von Parametern für das Zugkraftmodell enthalten sind. Die Modellgleichungen können anschließend dazu genutzt werden, verschiedene mögliche Systemzustände in Form der darin gültigen Kräfte- und Geschwindigkeitsverhältnisse zu berechnen.
Das anschließende neuronale Netz wird auf Basis zuvor aufgezeichneter Messdaten trainiert und dient der Prognose des Kraftstoffverbrauches für beliebige mögliche Systemzustände.
Ausgewertet wird jeweils der aktuelle Systemzustand, sowie eine Erhöhung und eine Absenkung der Arbeitsgeschwindigkeit um 0,5 km/h. Die modellierten Zustände werden nach der jeweiligen Prognose des Kraftstoffverbrauches mittels Zielfunktionen miteinander verglichen. Hierzu wurden die Optimierung der Kraftstoffeffizienz, die Maximierung der Arbeitsgeschwindigkeit, sowie die Minimierung der Betriebskosten implementiert.
Die Steuerung wurde nun dazu verwendet, die Forschungsziele zu untersuchen, im Genauen den Transfer zwischen den Traktoren Fendt 516 und Fendt 724. Hierzu wurden von beiden Maschinen Messdaten während der Bodenbearbeitung aufgezeichnet und die damit trainierten Netze untereinander in ihrer Vorhersagegenauigkeit verglichen. Die Netzarchitektur wurde dabei in allen Versuchen gleich belassen, lediglich die Lernrate wurde auf den jeweiligen Datensatz angepasst. Reine Trainingsdaten, der Transfer auf ein neues Zielsystem, sowie ein gemischter Datensatz wurden erprobt.
Netze, deren Trainingskonfiguration mit der Validierungskonfiguration übereinstimmt, weisen höhere Genauigkeiten auf, als Netze, bei denen dies nicht der Fall ist. Die Validierung des Transfers zeigt, dass durch den Transfer eines Netzes auf ein neues System die Vorhersagegenauigkeit des Netzes auf das System des Basistrainings abnimmt.
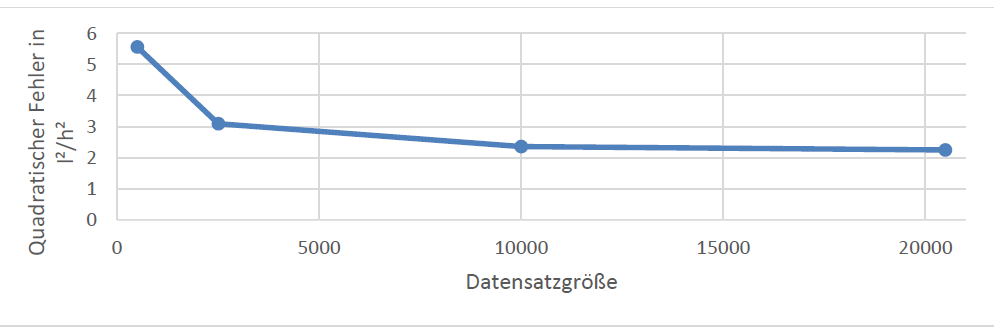
Um die notwendige Datenmenge beim Transfer eines Netzes auf einen anderen Traktor zu untersuchen, wurde ein Netz mittels der Daten des Fendt 516 vortrainiert und anschließend mittels einer variierenden Datenanzahl des Fendt 724 an das neue System angepasst. Die Abhängigkeit der Vorhersagegenauigkeit von der Datensatzgröße wird in Abbildung 2 verdeutlicht.
Die Variation der Trainingsdatenmenge zeigt, dass eine Steigerung der Datenmenge direkt mit einer höheren Vorhersagegenauigkeit einhergeht. Dieser Effekt ist vor allem bei geringen Datenmengen erkennbar, da der Datensatz in diesem Fall noch nicht alle relevanten Betriebspunkte beinhaltet.
Um die tatsächliche Nutzbarkeit des Systems zu verdeutlichen, wurde ein direkt auf das Zielsystem trainiertes Netz gegen einen menschlichen Referenzfahrer evaluiert. Um einen aussagekräftigen Vergleich zu erhalten, wurde dabei die Arbeitstiefe während der Evaluierungsfahrten mittels eines zusätzlichen Laser-basierten Arbeitstiefensensors auf eine konstante Tiefe eingeregelt, zur Vermeidung des Einflusses der Arbeitstiefe auf die notwendige Zugkraft.
Die Auswertung zeigte, dass durch diese Steuerung eine Verbesserung der Kraftstoffeffizienz um bis zu 14,3 % möglich ist.
Das Projekt 105 II des Fördervereins Mobile Arbeitsmaschinen e.V. (MOBIMA) wurde über Eigenmittel finanziert.